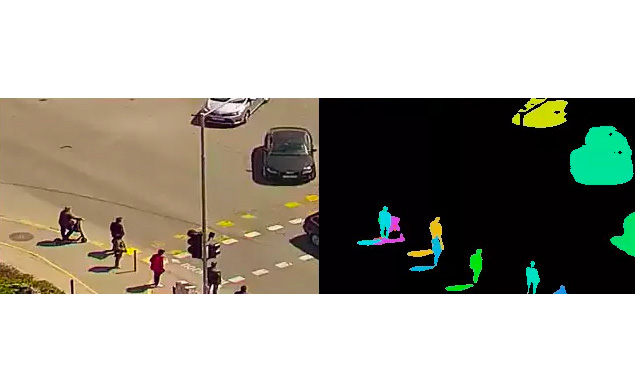
La présentation portera sur la détection et la segmentation des objets (voitures, piétons, …) présents sur des images issues de caméras de circulation ou de surveillance. Les modèles développés au Centre de Robotique permettent d’envisager de réaliser ces détections de […]