Détection non supervisée d’objets pour l’analyse du trafic routier
8 mai 2022
•
0 Comment
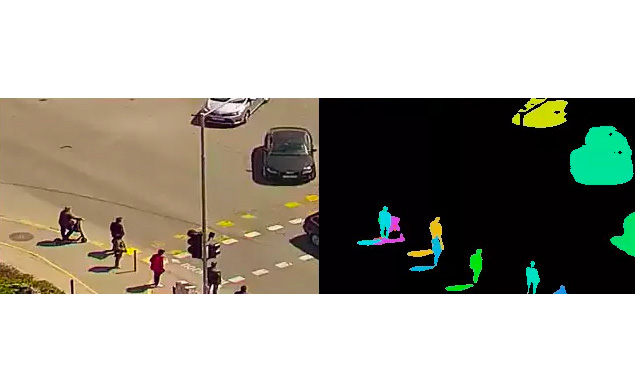
La présentation portera sur la détection et la segmentation des objets (voitures, piétons, …) présents sur des images issues de caméras de circulation ou de surveillance. Les modèles développés au Centre de Robotique permettent d’envisager de réaliser ces détections de façon totalement non supervisée, c’est à dire sans avoir besoin d’une base de données annotée par des intervenants humains, et sont aussi applicables pour des caméras dont le champ de vision est variable.
Contact : Bruno Sauvalle
Centre : Centre de robotique